Projects
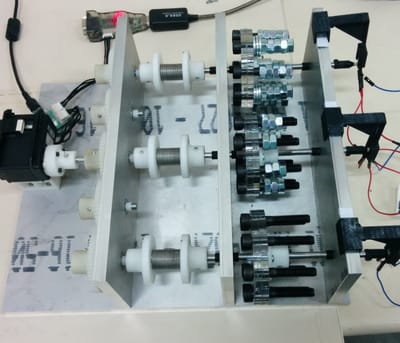
Worked on by Odded Geffen and Shai Gordon in 2017, this project investigates the possibility of a single input, multiple output mechanical system by using a mechanical band pass filter.
Read More
Worked on by Lior Tal and Anton Darovishevski in 2018, this project focuses on the design of a robot with novel locomotion, using pneumatic cylinders and brakes to skate around.
Read More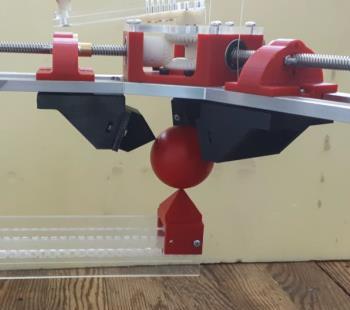
Worked on by Nir Ben Haim and Itai Kolberg in 2018, this project focuses on the design and manufacturing of a robotic gripper with four fingers and a single closing parameter. The gripper opens and closes in a regular tetrahedral form.
Read More
Worked on by Maayan Mizrakli and Ophir Weinreb in 2018, this project attempts to expand planar dual-friction fingertips to 3D using a ball contact.
Read More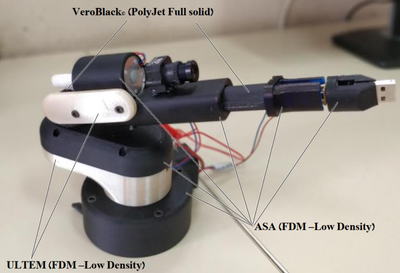
Worked on by Naor Edry in 2018, this project focuses on the design of a highly miniaturized 5 DoF robot, intended as the second half of a macro-micro robotic delivery system.
Read More
Worked on by Omer Yefet and Dolev Papo in 2020, this project developed a mobile takeoff and landing platform for drones. The mobile platform is meant to allow the carrying and deployment of drone across rough terrain by service dogs, such as for search and rescue. The project won the award for best student project 2020.
Read More