Ball-based 3D variable friction fingertips
This project builds upon the research involving variable friction robotic fingertips. The previous fingertips were cylindrical, and mostly suited for planar grasping. Expanding the concept to 3D, we attempted to use ball fingertips as a rolling contact surface for 3D grasps.
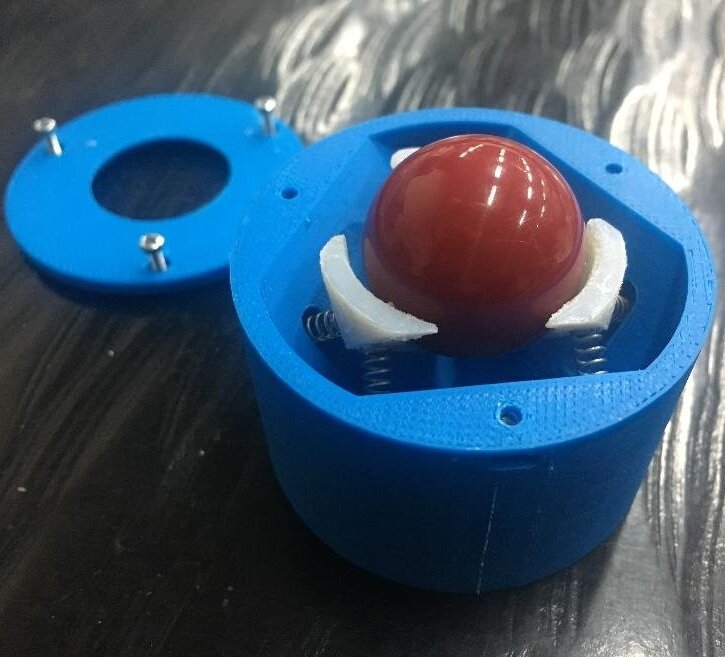
To achieve variable friction, a fingertip was designed with a "floating" ball casing, that uses springs to control the force required to lock the ball in place. Force analysis by angle was performed to evaluate the locking properties of the fingertip. Ultimately, the project proved to be an impractical method to achieve the goal of variable friction 3D grasping, and was not continued.
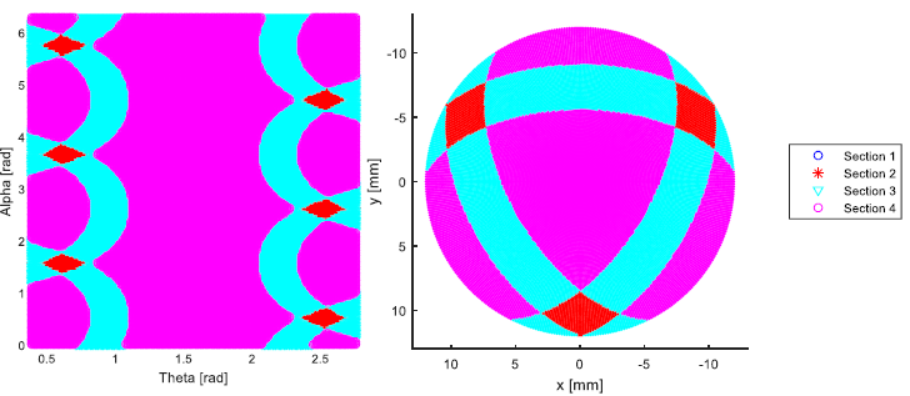
Figure: An example force analysis on a ball contact, varying the contact position .