Object Surface Exploration using Low-Cost Rolling Robotic Fingertips
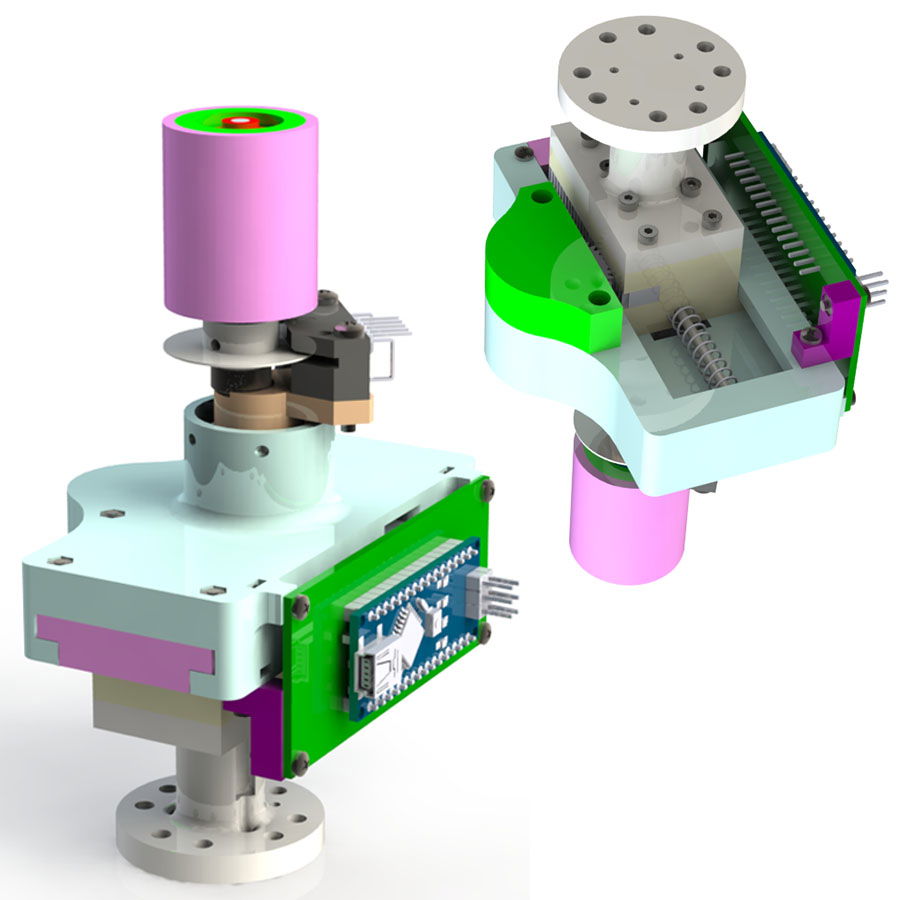
Tactile sensors are numerous and varied, and the data they provide has proven advantages in industrial and consumer products. Despite this fact, these sensors are not used to their full potential. This illustrates the need for low-cost, versatile tactile sensors. In this paper we introduce novel robotic fingertips that use low-cost components coupled with mechanical ingenuity in order to attain important and high-quality tactile data. Our robotic fingertips contain a rolling mechanism, and can sense the force applied to an object, the normal direction of the contact point, as well as parallel movement along the object’s surface. We show three main uses for this fingertip. Firstly, we demonstrate how the fingertips can be used for the detection of soft or lightweight objects by applying extremely small forces to them. Secondly, we present a method of full-perimeter definition (location and normal direction) of rigid objects by tracing. Lastly, we explain how our sensors can be used to detect stiffness and stiffness anomalies in soft objects, such as organic tissue.