Projects #Robotic Hands
Worked on by Nir Ben Haim and Itai Kolberg in 2018, this project focuses on the design and manufacturing of a robotic gripper with four fingers and a single closing parameter. The gripper opens and closes in a regular tetrahedral form.
Read More
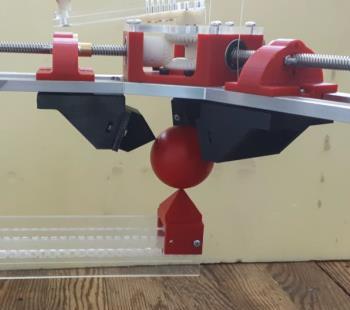
Worked on by Maayan Mizrakli and Ophir Weinreb in 2018, this project attempts to expand planar dual-friction fingertips to 3D using a ball contact.
Read More